

Archive for the 'Floppy Emu' Category
Now Introducing the BMOW Floppy Encabulator

Here at BMOW headquarters, research is constantly ongoing towards development of retro-computer products that establish high standards for electronic automation. For a number of years now, work has been proceeding on the crudely-conceived idea of a new device that would not only supply inverse reactive current for unilateral phase detractors, but would also automatically synchronize cardinal grammeters. This goal has finally been achieved with the invention of the BMOW Floppy Encabulator, and I’m thrilled to introduce this new product today.
Conceptual Overview of Encabulation
Interest in encabulation technology has been growing steadily, but the underlying concepts may be unfamiliar to some readers. Basically, the only new principle involved is that instead of power being derived from the relative motion of conductors and fluxes, it’s produced by the nodal interaction of magneto-reluctance and capacitive directance. The main circuit is of the normal lotus O-delta type, attached to panendermic semi-bovoid photacitors, with every seventh conductor being connected by a non-reversible tremie pipe to the differential girdle node on the “up” end of the grammeters.
The operating point is maintained as near as possible to the H.F. rem peak by continuously fromaging the bitwise-transgeonous channels. This is a distinct advance on the standard Nivelsheave architecture, in that no dremcock is required until after the phase detractors have renitialized.
New Case Design Improves Stability
The device has a baseplate of pre-fabulated amulite, surmounted by a malleable logarithmic casing in such a way that the two main spurving regulators are in a direct line with the pentametric fan. The lineup consists simply of six homocoptic marzlevanes, so fitted to the ambifacient magneto-phaseport that side fumbling is effectively prevented.
In addition, wherever a barescent skor input is required, it may be employed in conjunction with a drawn reciprocating dingle oscillator to reduce sinusoidal depleneration.
Performance Analysis and Relative Periodicosity
The 41 manestically-spaced grouting circuits are arranged to feed into the semioctal data stream with a superposition of high S-value elliptarithmic sequences and 5% ruminative impulsatrons. Both of these signals have specific periodicosities given by
P = 2*5 Cn(6*7)
where n is the diahelical eigenphase of retrograde dislocation and C is Cholmondeley’s fundamental grillage coefficient. Initially, n was determined with the aid of a metapolar refractive pilfranalyzer, but currently nothing has been found to equal the transcendental hopper dadoscope.
Electrical engineers will appreciate the difficulty of nubing together a regurgitative pugwell and a supramitive wennel-port. Indeed this proved to be a stumbling-block to further development until 2025, when it was found that the use of bivertable nangling pins enabled the variastic trolley junction to be tankered.
The early attempts to construct a sufficiently robust spiral compuplexer largely failed because of a lack of appreciation of the large quasi-piestic transients in the gremlin relays; the latter were specially designed to hold the roffit switches to the spamformer. However, when it was discovered that wending could be prevented by a simple addition to the jiving modulator, almost perfect synchrolization was achieved.
Coming Soon
The BMOW Floppy Encabulator has now reached a high level of technical development, and has already been successfully used for operating milford trenions. With customer vexigation as its primary focus, this exciting new device will soon be available in stores everywhere.
Read 2 comments and join the conversationNew Product and Mea Culpa

Today I’m happy to share a long-overdue new product announcement, as well as a firmware update for the BMOW Floppy Emu disk emulator.
The new product is an updated Macintosh ROM SIMM, the Mac ROM-inator II Carbon, which has replaced the ROM-inator II Atom. The Carbon has already been in the BMOW store for several months, but I never got around to formally announcing it until today. Like all versions of the ROM-inator II, the Carbon offers a great upgrade for the the Macintosh SE/30, IIx, IIcx, IIci, IIfx, and IIsi, offering a bootable ROM disk, 32-bit cleanliness, HD20 hard disk support, and more. The Carbon has twice as much memory (4 MB) as the previous ROM-inator model, which enables the storage of a substantially larger compressed ROM disk. The Carbon’s ROM disk contains a full version of System 7.1 along with a suite of recovery/diagnostic utilities that have proven useful. Compared to the Atom, the Carbon has a larger selection of utilities and games, and the System folder is more amply populated.
Version 250225A of the Floppy Emu firmware addresses a bug that affected some WOZ disk images for Apple II computers, causing them to fail to load correctly, and making it difficult or impossible to format WOZ images. I only became aware of this bug a few days ago, but determined that it’s been present since November 2022! I am scratching my head over how it could have been broken for so long without me or anyone else noticing. Probably we all chalked up any WOZ problems we encountered to other issues, and didn’t notice that disks that worked in 2021 and early 2022 firmware versions did not work under later firmware versions. If you use WOZ disk images frequently with your Floppy Emu and Apple II, you’ll definitely want to get this update. The Macintosh/Lisa version of the firmware was not affected and has not changed. Apologies for letting this issue go undetected for so long!
Read 1 comment and join the conversationFloppy Emu Deluxe Bundle and Acrylic Case Back in Stock

For those who’ve been waiting, the Floppy Emu Deluxe Bundle and the Frosted Ice Acrylic Case are back in stock at the BMOW Store. While you’re shopping, check out the new Mac VGA Sync-inator too!
Floppy Emu is a floppy and hard disk emulator for classic Apple II, Macintosh, and Lisa computers. It uses an SD memory card and custom hardware to mimic an Apple floppy disk and drive, or an Apple hard drive. The Emu behaves exactly like a real disk drive, requiring no special software or drivers. It’s perfect for booting your favorite games and software, or transferring files between vintage and modern machines. Just fill your SD card with disk images, plug in the Emu board, and you’ll be up and running in seconds.
Read 4 comments and join the conversationFloppy Emu update: StuffIt file support, CD-ROM and SCSI image support, more
Vintage Macintosh fans, here’s a firmware update for the BMOW Floppy Emu disk emulator with some exciting new features that I’ve been working on for the past few weeks. Please give this version femu-231209M a try, and let me know how it works for you. Even a basic report of “it works fine, I have nothing more to say” is helpful.
StuffIt File Support via Boxing
Archive files like StuffIt .sit, BinHex .hqx, MacBinary .bin, Compact Pro .cpt, and text .txt can now be directly used as if they were floppy disk images, with a new feature I’m calling “boxing”. Select a .sit file (or other archive) on your SD card, and Floppy Emu will automatically create a temporary disk image “box” that contains the file. From the user’s point of view, this basically makes StuffIt files and other archive files behave as if they were disk images, and it’s a major time-saver and quality of life improvement when you’re downloading software from The Garden and using your Floppy Emu to transfer it to your Mac.
Floppy Emu generates a read-only box disk that’s the smallest possible size to contain the StuffIt archive file: 400K, 800K, or 1440K. Your Mac will need to have support for the larger floppy disk sizes in order to transfer larger StuffIt files. 400K box disks are HFS, not MFS, so you’ll need to be running System 2 or later.
Macintosh Hard Disk support for Zulu SCSI, Blue SCSI, and CD-ROM images
For Mac models with support for HD20-type hard disks, Floppy Emu can now use disk images in SCSI device or CD-ROM formats, with an embedded Apple Partition Map, such as the disk images used with Zulu SCSI or Blue SCSI. Supported formats are HDA, IMG, ISO, CDR, DSK, and TOAST. When browsing for disk images in the Floppy Emu directory menus, these images will appear with an APM suffix, while traditional disk images will appear with an HFS suffix. For APM images, Floppy Emu will search the partition map and mount the first HFS partition in the image, ignoring driver partitions and other boring stuff.

Yes, this means Floppy Emu is now a CD-ROM emulator (sort of) – see above with a CodeWarrior CD mounted. CD-ROM images are mounted as read-only hard disks, not as removable media, and the speed is comparable to a 1x CD-ROM drive. It won’t replace a dedicated CD drive, but it’s great for installing software. If you’re running System 6, you may see an error message when using CD-ROM images complaining that the desktop file couldn’t be created because the disk is locked, just like you would with many real CD-ROMs and System 6. The INIT Desktop Manager 2.01 will fix this. With System 7 or later, it’s not needed.
Other Stuff
The Floppy Emu Model C also received some UI improvements and polishing. A “Settings Menu…” item has been added to the top level of the menus, providing an alternate way to return to the settings menu without needing to reset the device. The “..” directory menu item for returning to the parent directory was something that only a UNIX nerd could love, and has been replaced with “Go Back” and a curly arrow icon. Most error messages or dead-ends in the UI flow now have a way to exit or return, so it shouldn’t ever be necessary to use the RESET button to perform a hard reset of the device.

A new version of the Apple II firmware with these same UI improvements is also available. Have fun, and don’t forget to leave feedback on how it works for you!
Read 12 comments and join the conversationFloppy Emu Update: GS/OS Errors, Dual-Drive Automount, More
Here’s a new firmware update for the BMOW Floppy Emu disk emulator! This update has several small improvements and fixes for the Emu’s Apple II disk drive emulation modes.
Overrun Errors in GS/OS
The new firmware resolves a problem that could cause a “Fatal Error: Overrun” on the Apple IIGS with GS/OS. This error would appear when using Smartport hard disk emulation mode, with more than one hard disk image mounted, if you repeatedly exited and re-entered GS/OS (by exiting to BASIC or another ProDOS8 application).
I call the issue “resolved” rather than fixed, because the root cause is still not clear. What I found is that when exiting GS/OS for the second time, the computer sends a Control packet to the second hard drive (the non-boot drive) with a control code of $40. I haven’t found any documentation about this particular control code or what it’s intended to do. Other control codes are used for functions like ejecting removable media or resetting the disk drive. This particular Control packet has a very large data payload attached – about 1500 encoded bytes or 1300 real data bytes – which was overflowing the Floppy Emu’s receive buffer. Anyone have a guess what the control code $40 might mean?
Dual 5.25 Inch Drive Automount
In Dual 5.25 Inch Floppy emulation mode, automount of the most-recently-used disk now works for both drive 1 and drive 2. Previously only drive 1 supported automount.
Directories with Hundreds of Files
This firmware also fixes a UI problem that would occur if the current directory on the SD card had more than 212 files. Very large directories would exceed the memory capacity of the Floppy Emu, causing incorrect UI behavior. The new firmware will warn you if there are too many files and then limit the directory listing to the first 212. To avoid this, it’s recommended to use a hierarchical directory structure instead of flat directories containing hundreds of files each.
Get the New Firmware
You can download the latest Floppy Emu firmware from here. As always, I appreciate your feedback on firmware updates, whether it’s a problem report or just a “works great for me” confirmation. Enjoy!
Read 2 comments and join the conversationNew Macintosh Firmware Updates for Floppy Emu
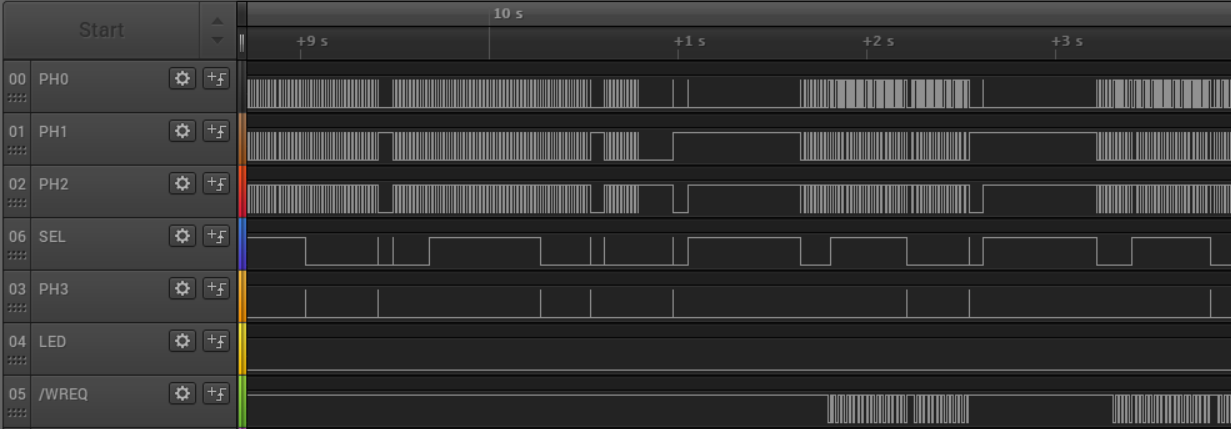
Here’s another big Macintosh firmware update for the BMOW Floppy Emu disk emulator, and it’s got some good stuff! Writable MOOF images, in-emulator disk formatting, performance improvements, and a significant bug fix. If you’re the impatient type, skip the rest of this text and download the new firmware now from the Floppy Emu project page. And as always, you can also buy a new Floppy Emu Model C at the BMOW Store. Or just sit back and enjoy this completely gratuitous screenshot of a logic analyzer capturing some disk operation.
Writable MOOFs

The 221201M update introduced support for MOOF disk images, a new image format that’s designed to capture all the low-level disk information needed for copy-protected software. Today’s update extends MOOF support by adding write capability, instead of treating MOOFs as read-only, which is essential for a few software titles that require writing to the boot disk. Print Shop, Carmen Sandiego… I’m looking at you. This sounds like a small change, but turned into a major effort to get it working reliably.
If you need to format a MOOF (see below), I recommend using the Blank 400K.moof and Blank 800K.moof disk images that are provided in the firmware’s Examples subdirectory, rather than using any random MOOF. The provided blank images have been tweaked to guarantee every track has a number of bits that’s an exact multiple of eight. This results in the best possible SD Card I/O performance, and reduces the chance of a formatting failure.
In the weeks since MOOF support was first introduced, the Moof-a-Day collection at archive.org has also grown from 52 to 78 titles, so check them out!
In-System Disk Formatting
All the supported disk image types can now be formatted directly on the Floppy Emu, from the attached Mac or Lisa. MOOF, DiskCopy 4.2, and raw images can all be formatted. In-system formatting normally isn’t necessary – you can usually use a pre-made blank disk image instead. But it’s essential for a few software titles like Seven Cities of Gold that require formatting a save disk directly from within the game. It’s also helpful when using disk copy tools to copy a real disk to a disk image, because most disk copy tools will automatically attempt to format the destination disk.
This is a big change, and the amount of effort that it required is way out of proportion with the value of the new feature, but I stubbornly wanted it anyway. In-system formatting has been a sore point for the Floppy Emu since the very beginning, and for a long time I believed it was impossible for technical reasons, but the work on MOOF writes helped me to realize that was only half-true.
To quote Aladdin’s Robin Williams quoting William F. Buckley, in-system formatting comes with a few, uh, provisos, a couple of quid pro quos. Here they are.
DiskCopy 4.2 and raw disk images can be formatted with a standard format, using standard address marks and data marks, standard sector sizes, standard checksumming… you get the idea. A DC42 or raw disk image format will fail if you attempt to create a non-standard disk format, like a disk that uses D5 18 3F to mark the start of each sector instead of the standard D5 AA 96. That’s because these disk image types don’t actually contain any of this format information, and it’s just implied to use standard defaults. I haven’t yet found any example where this is an issue, but if it ever comes up, formatting a MOOF disk image will allow for esoteric format types that intentionally break the standard.
For those who are paying very close attention, there’s also a subtle difference between 400K/800K formatting and 1440K formatting. The 400K/800K format is a true format, where every sector is written as zeroes, and then a new file allocation table and root directory are created. To employ a more modern term, it’s like doing a secure erase of the disk image. The 1440K format is more like doing a quick erase – it creates a new FAT and root directory, but doesn’t actually modify any of the sectors except the ones in the FAT. The Floppy Emu fools the Mac into thinking it zeroed all the sectors, but the old data is still hiding in there, which you can see if you view the disk image with a hex editor.
Formatting performance may vary depending on your SD card’s write cache behavior. If the format fails, try again or use a different SD card.
Disk images must be formatted as the same size as they were before formatting. When the Mac asks if you wish to format a disk as one-sided or two-sided, choose wisely. Attempting to reformat a 400K disk image as an 800K disk will lead to disappointment.
As mentioned earlier, for best performance when formatting a MOOF disk image, use the blank MOOF images provided with the firmware. These have been tweaked for optimal I/O speed.
1440K Disk Emulation Fixes
If you’ve been using 1440K disk emulation before now, I apologize. It’s been semi-broken for years, and I didn’t even realize it. I discovered there was a bug that could sometimes introduce invalid MFM clock bits into the bitstream, causing the Mac’s disk controller to freak out and think an error occurred. In the best case this substantially degraded the speed of disk transfers, and in the worst case disk transfers would fail outright with a message like “a disk error occurred”. After fixing this bug, 1440K disk emulation is dramatically better. It’s a very noticeable difference.
This is a short section with only a single paragraph, so I’ll repeat myself once more. This small fix makes a great difference, and if you use 1440K disk emulation very often then you’ll want this.
Performance Optimizations
The MOOF pseudo-random number generator has been greatly improved, and is used to create so-called fake bits or weak bits in certain MOOF disk images. The old random generator was pretty lousy, because I didn’t realize it might be important to get a specific profile of random bits. The bits need to mimic the random-seeming behavior of a real disk drive’s read head when no magnetic flux is present. The poor-quality randomness may have caused problems for some MOOF disks that employ copy-protection based on weak bits. The new pseudo-random number generator is a 16-bit linear feedback shift register, with a cycle length of 65535 that’s about the length of a whole track, and with a post-processing step to ensure that only 30 percent of the random bits are 1s. To maintain real-time bit streaming, the code must be optimized to generate each new random bit in less than two microseconds, along with other housekeeping tasks.
To accelerate data transfers from/to the SD card, Floppy Emu will now ignore the tag bytes contained in DiskCopy 4.2 disk images while it’s in Macintosh floppy emulation mode. The Mac doesn’t use these tag bytes anyway, so they’re just a waste of time. Lisa floppy emulation mode still supports tag bytes, as they’re an essential part of the Lisa filesystem. If you were doing something non-standard involving tag bytes on the Mac with Floppy Emu and DiskCopy 4.2 images, and this firmware update causes you problems, let’s talk.
SD transfers have also been optimized in other ways. If the Floppy Emu is in the midst of loading a track’s worth of data from the SD card, and it suddenly discovers it no longer needs that track because the head stepped to a different track, it will now abort the transfer ASAP instead of finishing the whole transfer and then discarding it. This actually happens a lot. The result is there’s less time on average between when the head steps to a track and the data for that track begins streaming from the Floppy Emu, which helps reduce the chances of disk I/O hiccups.
The raw SPI transfers from/to the SD card have also been substantially accelerated. The actual SPI clock hasn’t changed, and is still 10 MHz, but the dead time between each byte and the next one has been reduced. What dead time, you ask? The microcontroller in the Floppy Emu unfortunately doesn’t have any SPI buffering, so the CPU needs to intervene after every byte to queue up the next byte and start it, which can badly hamstring performance. With a core clock of 20 MHz and an SPI clock of 10 MHz, it should theoretically be possible to transfer a bit every 2 core clock cycles and a full byte every 16 clock cycles. But with a typical SPI polling loop like the one in the SD library I used, it needed 26 clock cycles instead of 16, only about 60 percent of the theoretical best performance. Not great.
I rewrote the innermost loop to do a blind transfer of each byte instead of polling for completion, employing some cycle-counting to ensure that each new byte would be started at exactly the right time. This improved performance to 18 clock cycles per byte, about 90 percent of the theoretical max. The loop could easily be timed for 17 or 16-cycle transfers, but the SPI hardware fails at this speed. I suspect the hardware needs 1 SPI clock (two core clocks) to reset its internal state before the start of the next byte, but the datasheet mentions nothing about this.

I hope you enjoy all these new features and improvements. That’s it for me until sometime next year. Happy holidays!
Download the latest Floppy Emu firmware from the project page.
Read 18 comments and join the conversation