

Archive for November, 2007
6502 Inspiration
The design of my machine has been significantly influenced by the 6502, the microprocessor used in most 80’s home computers, and the one with which I’m most familiar. There are no published descriptions of the 6502 internals that I know of, however. The documentation describes the instruction set interface, not how those instructions are implemented.Still, I was able to infer a lot from the nature of the 6502 instruction set and addressing modes, and the known clock cycle requirements for the various instructions. I plan to have an instruction set very similar to the 6502’s, to make it as easy as possible to port code. That may seem uncreative or like cheating to some, but I don’t see a good reason for inventing my own oddball instruction names, conventions, and assembler syntax just for the sake of being different. So where possible, I’ll make instructions that look and act like their 6502 counterparts.
I also plan to support at least these addressing modes:
| Mode | Example | Description |
| implied | INX | operand implied |
| absolute | LDA $HHLL | operand is address $HHLL |
| absolute, X-indexed | LDA $HHLL,X | operand is address incremented by X with carry |
| immediate | LDA #$BB | operand is byte (BB) |
| indirect | LDA ($HHLL) | operand is effective address; effective address is value of address |
| PC-relative | BEQ $BB | branch target is PC + offset (BB), bit 7 signifies negative offset |
| stack-relative, X-indexed | LDA SP,X | operand address is stack base incremented by X with carry |
All but stack-relative addressing mode are from the 6502.
Despite the similarities in instruction set and addressing modes, my machine will be inferior to the 6502 in that it lacks a Y register, zero-page addressing, decimal mode, interrupts, and the capability to set the stack pointer and push the condition code flags on the stack, among others. On the other hand, it will be superior to the 6502 in that it provides a full 16-bit stack pointer (the 6502 has an 8-bit SP) and stack-relative addressing mode, which I see as a necessity for implementing programs in languages like C.
I’ve worked out the microcode and timing for a handful of sample instructions, using my proposed microarchitecture design. Here’s how I stack up against the 6502. Where two numbers are shown, the larger number is for the case where a page boundary (256 bytes) is crossed while doing address arithmetic.
| Instruction | Description | 6502 clock cycles | My clock cycles |
| ADC | add with carry, immediate | 2 | 2 |
| JMP | jump to absolute address | 3 | 4 |
| BMI | branch if minus | 3/4 | 4/5 |
| INC | increment memory, absolute, X-indexed | 7 | 7/8 |
| PHA | push accumulator onto stack | 3 | 2 |
| JSR | jump to subroutine, absolute | 6 | 8 |
| RTS | return from subroutine | 6 | 6 |
| LSR | logical shift right 1 bit, implied | 2 | 9 |
| LDA | load accumulator, stack-relative, X-indexed | N/A | 4 |
Component Details
An explanation of the components shown on the block diagram I posted yesterday.
Registers:
- A is the accumulator register, although the hardware assigns it no special significance, and X can do anything that A can.
- X is the index register. It can be used for indexed addressing modes, where the value in X specifies an offset from a base address to get the effective address. It can also be used as a general-purpose register.
- T is a temporary register, used by the microcode to implement various instructions, but not visible to the application programmer.
- The pseudo-register X7 is used to sign-extend the 8-bit value of X when adding it to a 16-bit address.
- 0 is just a hard-wired 0 value.
- CC is the condition code register, which stores the flags (equal, carry, etc) from an ALU operation. It’s a parallel in, serial out shift register, so only one flag can be examined per clock cycle, and it may be necessary to spend a few cycles to shift the desired flag into position to be read. I stole this design from my college textbook.
Addressing: Any of three different sources can be selected by the microcode to drive the address bus on a given clock cycle. The low or high byte of the address bus can also drive the data bus if needed. The address registers are counters, and so can be incremented or decremented without using the ALU. None of the address registers are directly visible to the application programmer.
- PC is the 16-bit program counter, with separate low and high bytes.
- SP is the 16-bit stack pointer.
- AR is a generic 16-bit address register, used for memory accesses where the value in PC and SP can’t be disturbed.
Control: The microcode is stored in 3 parallel 8K ROMs, yielding 13 inputs and 24 outputs. The inputs are the opcode register OP for the current instruction (8 bits), the phase (a 4-bit counter, essentially a PC for the microcode), and the flag input from the condition code register. The outputs are:
- ALU left input selection: 2 bits
- ALU right input selection: 2 bits
- ALU function (add, subtract, shift, etc): 6 bits
- ALU drive enable: 1 bit
- Data load enable signals (can be one of A, X, T, PCLO, PCHI, ARLO, ARHI, MEMORY): 3 bits
- Enable CC: 1 bit
- Load/~Shift CC: 1 bit
- Address bus source (can be one of PC, AR, SP): 2 bits
- AR++: 1 bit
- PC++: 1 bit
- SP++: 1 bit
- SP–: 1 bit
- OP load enable: 1 bit
- Not connected: 1 bit
A microcde example might help.
ADC (Add With Carry): Interpret the next 2 bytes after the opcode as a memory address, read a value from that address, and add it to the accumulator, loading the CC register with the carry flag. 4 clock cycles.
| ALUleft | ALUright | ALUfunc | ALUdrive | DATAload | EnableCC | ADRsource | PC++ | LoadOP | Comment |
| x | x | x | 0 | ARlo | 0 | PC | 1 | 0 | ARlo <- MEMORY(PC), PC++ |
| x | x | x | 0 | ARhi | 0 | PC | 1 | 0 | ARhi <- MEMORY(PC), PC++ |
| x | x | x | 0 | T | 0 | AR | 0 | 0 | T <- MEMORY(AR) |
| A | T | add | 1 | A | 1 | PC | 1 | 1 | A <- A + T, LOAD CC, OP <- MEMORY(PC), PC++ |
Memory: I expect to have RAM, ROM, a combination UART/USB interface, and console switches share a single 64K address space. I plan to use a single-chip USB interface solution like this one, which should be easier than a serial port for connecting to a PC. I haven’t yet looked at it in detail, though. The exact type of ROM (EPROM, E/EPROM, Flash) is still up in the air as well.
Be the first to comment!The Adventure Begins
After several weeks of digging through the details of other designs, re-reading my college texts, sketching out data paths, and writing test microcode for my various design ideas, I arrived at what I hope is a mostly-complete block diagram for the computer. I wrote out the microcode for a dozen or so instructions that I expect to have in the machine’s instruction set, to prove to myself that they were all computable in a reasonably efficient number of clock cycles. Most instructions look like they’ll require 3 or 4 clocks, with the most complicated read-modify-write instructions using indexed addressing modes taking about 10 clocks.
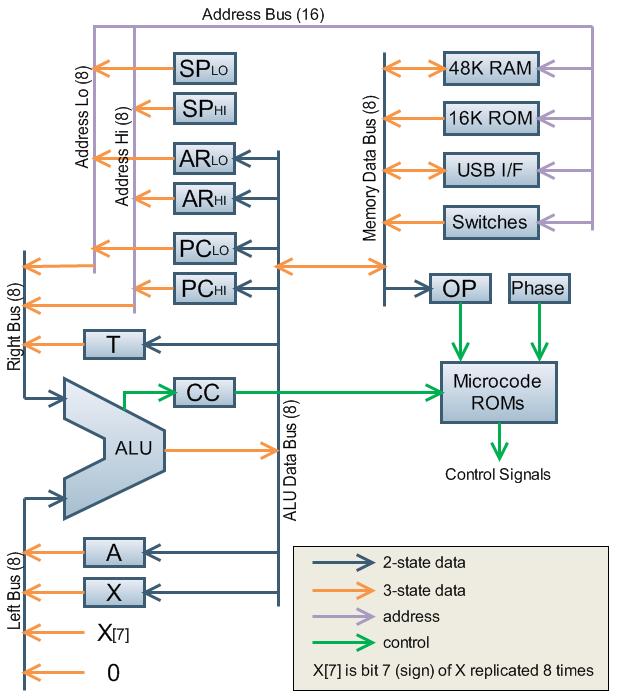
One of the possible ALU inputs is a hard-wired zero. When writing the sample microcode, I found that a zero input would help me shave a clock or two off many instructions. X[7] is another special ALU input. It’s the sign bit (bit 7) of X, replicated 8 times. It makes it easy to do sign extension when adding a signed 8-bit number to a 16-bit address, such as when doing a relative jump or using an indexed addressing mode. It feels a bit ugly, but it cuts two clock cycles off every branch instruction.
Note that the ALU data bus and memory data bus are separated by a bi-directional bus driver. This enables them to do work in parallel. For many instructions, the next opcode can be fetched from memory and stored in the OP register simultaneously with the last step of the computation by the ALU.
I haven’t yet created a detailed circuit schematic, but I know roughly what parts I’ll need. I made an approximate tally of 40 chips used in the design, plus a few more I’ll undoubtedly need for clock generation, signal buffering, and glue logic. The total should be under 50 chips, which I hope is few enough to fit onto a couple of circuit boards. Physical construction is still a ways off, but I’m always trying to think ahead.
The next step is to get feedback on the current design, and make sure there aren’t any major problems I overlooked. After that, I plan to move on to creating a Verilog model of the design, so I can simulate it and work out the flaws before I break out the soldering iron.
Be the first to comment!