

Archive for the 'Floppy Emu' Category
New Cases for the Daisy Chainer!
Hello! If you haven’t met me already, I’m Alice, the BMOW engineering intern. (You might hear more about what I’ve been up to soon.) I’m excited to share that after several stages of redesign, cases for the Daisy Chainer are finally here! These clear acrylic enclosures will protect your Daisy Chainer and show it off with style. This is a plate style case similar to the ADB-USB Wombat with open sides and a logo-etched top. Available now on the store!
Dark Castle Bugs

Here’s a brief follow-up about the classic Macintosh game Dark Castle, which I mentioned a few weeks ago in connection with some possible disk emulation bugs. This game originally shipped on two 400K floppy disks. At the intro screen shown above, the player is given a choice of doors, and some of the doors will ask the player to insert disk 2. But when loading the 400K game disk with a Floppy Emu disk emulator, the disk swapping doesn’t work. Disk 1 doesn’t get ejected, and if disk 2 is inserted, it will be ignored. A few weeks ago I speculated that this may be caused by a Floppy Emu bug, but I was wrong.
After a bit of research, I found that the problem is just another example of Games That Only Work In Drive 1. This is pretty common in the Apple II world, but not so common for Macintosh games. When Dark Castle tries to eject disk 1, it specifically tells drive 1 (the internal drive) to eject, regardless of which drive contains the disk. Then it checks the same drive for disk 2. Since Floppy Emu is normally connected to classic Macs as the external drive (drive 2), this doesn’t work. To confirm this behavior, I disassembled an old Mac and connected a Floppy Emu internally, in place of the built-in floppy drive. With this configuration, Dark Castle 400K worked fine.
BMOW’s Vintage Apple Software Collection SD Card has an 800K version of Dark Castle, where the contents of both 400K disks have been copied onto a single 800K disk. This avoids the need for disk swapping, so the game can be played normally from a Floppy Emu or other external floppy drive, but it requires a Macintosh model that’s compatible with 800K drives. The oldest Macintosh models are only compatible with 400K drives. For those models, playing Dark Castle will require connecting the Floppy Emu internally as I did, or copying the disk images from the Floppy Emu onto real 400K disk media for use in the internal floppy drive.
Be the first to comment!New Product Release: Dual 5.25 Adapter for Disk II, and Apple IIc Drive Switcher 2.0
Today Big Mess o’ Wires is releasing two new products for use with the BMOW Floppy Emu disk emulator for Apple computers. Remember the dual 5.25 inch floppy emulation mode that was announced back in February? It gave the Floppy Emu Model C hardware the ability to emulate two 5.25 inch drives at once, which is great for two-disk games and for reducing disk swapping. But sadly the Apple IIc and the Disk II Interface Controller card both lack the I/O signals required to control two drives over one cable. I hinted that adapter solutions might be coming soon; now here they are!
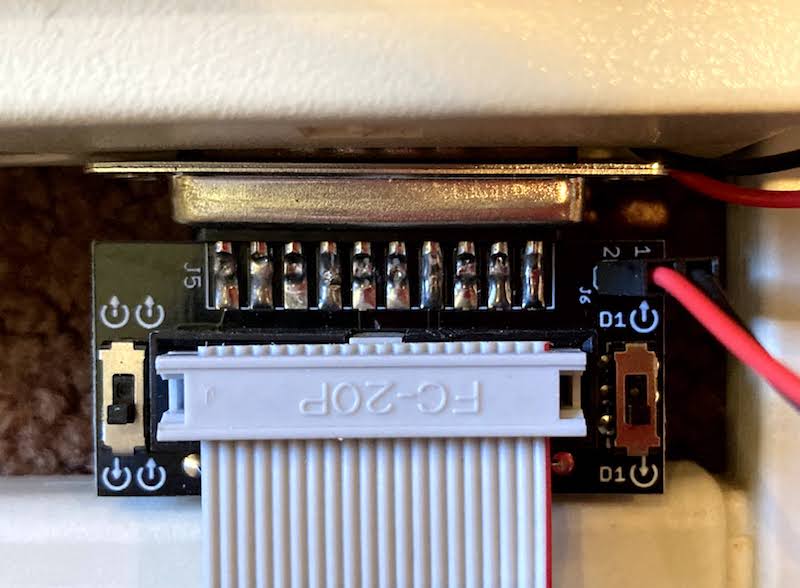
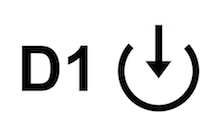
The Internal/External Drive Switcher is a two-piece adapter for the Apple IIc, providing an easy way to select which floppy drive will act as Drive 1. This new version 2.0 of the Switcher also adds optional support for dual 5.25 inch floppy emulation. Like the original 1.0 version, it’s a great convenience option for the IIc, which normally can only boot from its internal 5.25 inch floppy drive. Now IIc owners have three options:
| BEHAVIOR | SWITCH ONE | SWITCH TWO |
|---|---|---|
| Swapped Mode Drive 1 is external, Drive 2 is internal |
 |
 |
| Normal Mode Drive 1 is internal, Drive 2 is external, default Apple IIc behavior |
 |
|
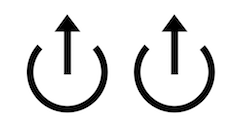
| Dual External 5.25 Mode Drive 1 and Drive 2 are external, requires Floppy Emu Model C configured for Dual 5.25 emulation mode |
|
 |
| Invalid setting, do not use | |
|
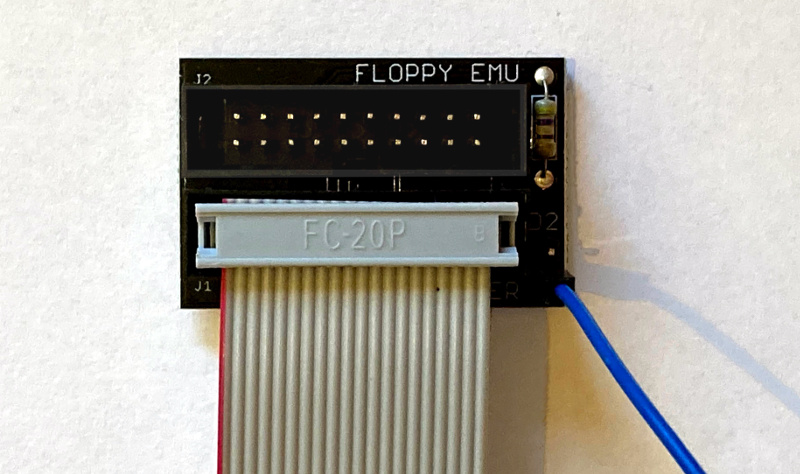
The Dual 5.25 Adapter for Disk II Interface Card works with the venerable Apple disk controller card found in most Apple II Plus and IIe computers. This disk controller card has two separate 10 x 2 pin rectangular connectors for two separate drives, instead of supporting two daisy-chained drives on a single cable like the later Apple II models. The Dual 5.25 Adapter takes all the I/O signals from the card’s Drive 1 connector, plus a single enable signal from the card’s Drive 2 connector, and merges them together for use by the Floppy Emu. Hello dual 5.25!
Both products are available now at the BMOW Store.
Read 4 comments and join the conversationFloppy Emu Update: Smartport Daisy-Chain Support

As of today, the BMOW Floppy Emu disk emulator now offers two different firmware versions for Apple II users: a normal version and a Smartport daisy chain version. You’ll find them both in the Firmware Downloads section of the Floppy Emu project page. Most people should use the normal firmware version, and it’s the default for newly-purchased hardware. The Smartport daisy chain firmware version is only needed in uncommon situations when:
AND
2. The Floppy Emu is plugged into the back of a BMOW Daisy Chainer or to the Apple Unidisk 3.5 drive, A2M2053.
If in doubt, get the normal version. You can switch freely between versions as needed. There’s no harm in using the “wrong” version, but some disk emulation details may not work as expected, and the normal version offers a higher level of protection against misconfigured disk drives. If you don’t care about the gory details, then just install the version you need, and have a nice day. But if you enjoy learning about low-level disk voodoo, read on.
Why Two Firmware Versions?
Why are there two different firmware versions? Why not have one version, with some kind of user-selectable option for Smartport daisy-chaining? That would surely be more convenient, but it wouldn’t do the job that’s required here. The essential difference between these two firmware versions is the default power-up configuration of Floppy Emu’s CPLD chip, before the Emu’s on-board code has even begun to run. By the time that code could check a user option and decide how to change the configuration, the critical moment where the configuration is relevant would have already passed.
The difference is specific to a disk I/O signal named SELECT. With the normal firmware, SELECT is always configured as a CPLD input, and an external measurement will appear to show a floating voltage. But if using the Smartport daisy chain firmware, SELECT is initially configured as a pull-down: an output driving a logical zero value. It’s later reconfigured as an input, or not, depending on the Floppy Emu’s selected emulation mode. This is necessary in order to support detection of daisy-chained Smartport and Unidisk 3.5 devices, when other devices of the same type check for daisy-chaining at power-up. This scenario is fairly rare: it only happens when two intelligent Smartport devices are daisy-chained together, and Floppy Emu is the second device. That’s what conditions 1 and 2 above mean. When Floppy Emu is the sole Smartport device, or its selected emulation mode is 3.5 inch or 5.25 inch floppy rather than Smartport, then the normal firmware is the way to go.
The Tale of SELECT
What’s all this business with SELECT? Isn’t it a bad idea to dynamically reconfigure an input as an output? I agree it seems dubious, but that’s Apple’s design. I discussed the mechanism in more detail a few years ago here. In brief, SELECT is an input for dumb 3.5 inch floppy drives, used to select between the two sides of the disk. For 5.25 inch drives, the same pin is a 5 volt power connection. But for intelligent Smartport and Unidisk 3.5 drives, the SELECT pin is hardwired to ground inside the drive. The SELECT pin on the Unidisk 3.5’s rear daisy chain port is connected internally to an RS latch. The latch is cleared during power-up, but if SELECT ever goes high the latch will be permanently set. So in order to convince the Unidisk 3.5 that the next daisy-chained drive is another Unidisk 3.5 or similar intelligent Smartport device, SELECT must be held continuously low from the first moment of power-up. The BMOW Daisy Chainer uses the same technique to detect the selected emulation mode of the Floppy Emu that’s plugged into it.
To meet that requirement of “continuously low from the first moment of power-up”, the Floppy Emu CPLD’s default configuration must pull SELECT low, even before the code on Floppy Emu’s microcontroller has begun to run. But if a pulldown isn’t wanted at power-up, a different default CPLD configuration is needed. That’s why this requires two different firmware versions for these two different behaviors.
All this input/output direction switching for SELECT can be problematic. We can blame Apple for this. Floppy Emu includes an inline protection resistor between SELECT and the CPLD, to guard against possible signal contention if the computer tries to drive a signal on SELECT at the same time the Floppy Emu activates the SELECT pull-down for daisy chaining.
What happens if you use the normal firmware in a setup with two daisy-chained Unidisk 3.5’s or other Smartport devices? Nothing harmful, but the second Smartport device (which in this case is a Floppy Emu) won’t be recognized correctly. The first Unidisk 3.5 drive will think the Floppy Emu is some other type of drive, and won’t pass along the required I/O signals during Smartport activity. This is also exactly what happens with some other vendors’ Apple II disk emulators: they don’t pull down SELECT correctly, so they don’t support Smartport daisy-chaining. Maybe you never noticed. This little detail is one important piece of giving Floppy Emu maximum compatibility.
Microamps and Milliamps
So what happens if you use the Smartport daisy chain firmware in a setup where it’s not actually needed? Why not just always use that firmware? That’s actually exactly what all prior versions of the Floppy Emu firmware have done since 2019. Though I never used the term before, all prior firmware versions were essentially Smartport daisy chain versions, and it worked fine. But a recent analysis convinced me it’s better not to include the SELECT pulldown behavior of the Smartport daisy chain firmware if it’s not actually needed.
The issue is the current that’s present on SELECT when the pulldown is active but the computer is trying to drive the signal high. The Floppy Emu’s inline resistor limits the current, and this seems to be exactly how Apple intended things to work. The Apple IIgs and the (dumb) Apple 3.5 Drive both include an inline resistor on the SELECT output for the same reason. But it’s still not good practice, and it creates a burst of comparatively high current (compared to the other disk I/O signals) whenever it happens. This may create EM noise and minor signal integrity problems elsewhere. Over the long term it may also start to degrade the silicon structures in the CPLD’s input; a milder form of the same concern I previously described here. This SELECT pulldown current can happen by mistake, when the Floppy Emu is configured for Smartport emulation mode but is connected to a Disk II Controller Card or other controller that doesn’t support Smartport. Or it can happen briefly during normal use, either during power-up or when multiple drives of different types are daisy chained, each one using SELECT in a different way.
To be clear, there is no extra current present on SELECT when Floppy Emu’s emulation mode is configured as Smartport or Unidisk 3.5, and it’s daisy-chained to the rear of another Unidisk 3.5 or the BMOW Daisy Chainer. That’s exactly how the pull-down is intended to be used. Nor is there any extra current in typical scenarios where Floppy Emu is configured as Smartport or Unidisk 3.5 and plugged into the disk port of an Apple IIc or IIgs. No issues there.
I may be overly paranoid and this extra current may be just a nuisance or totally harmless. Experience from the past few years says it’s a minor issue at best, but nevertheless I want to eliminate it where I can. Because the SELECT pulldown is only needed in uncommon cases when two Smartport devices are daisy-chained, I feel better having the default firmware just disable the pulldown completely, to get the most robust possible behavior. Those few people who need the Smartport daisy-chaining support can use the alternative firmware version where the SELECT pulldown is enabled as needed. Everyone can be happy.
Read 5 comments and join the conversationFloppy Emu Update: WOZ Writes, Dual 5.25 Emulation, and More!

Today I’m excited to introduce a major new feature update for the BMOW Floppy Emu Disk Emulator. The latest firmware for use with Apple II computers adds the three most frequently requested new features: writeable WOZ and NIB disk images, formattable disk images, and dual 5.25 inch floppy drive emulation. Each of these three was tricky to implement, and I’ve lost track of how many times I said these things were too complex or the hardware couldn’t support it. Forget all that, because here it is! This is the biggest set of changes to the firmware in the whole history of the Floppy Emu, requiring some extensive rework under the hood. I hope the results are worth it.
The new firmware is version 0.2Q-F29. You can download the latest firmware here: firmware
WOZ and NIB disk images are now writeable!
This is great for copy-protected programs that need to save some information to the disk, like your Print Shop printer settings or your Castle Wolfenstein game progress. While the sector-oriented disk image types like .PO, .DO, and .DSK have supported writes since day one, the bitstream disk images (WOZ and NIB) typically used for copy-protected programs were previously treated as read-only by the emulation engine. No more. Your Wolfenstein games will now be safely saved.
Getting this to work was challenging, because the Floppy Emu wasn’t originally designed to handle raw bitstreams. A few simplifying assumptions were made in order to bridge the gap. It’s possible a few programs may cause trouble if they perform writes in a very non-standard way, though I haven’t yet found any real-world examples. The firmware doesn’t make assumptions about sector sizes or layouts or headers, so it should work OK even if the written data doesn’t look like standard DOS/ProDOS sectors. For example, Wolfenstein writes sectors whose data header begins with the bytes D5 DA AD instead of the normal D5 AA AD.
WOZ disk images contain a read-only flag in their header. Writing to the disk image will be disabled if this flag is set.
You can format 5.25 inch disks!
This is great when making disk copies, or if you need to create a save disk from within a game like King’s Quest. In-emulator disk formatting makes life much more convenient when copying or saving data. I have striven to make formatting a feature that “just works” as much as possible, but there are a few important details to know.
Successful formatting is dependent on the write caching behavior of your SD card. If the card introduces too many long delays during writes while it flushes its internal cache, the format may fail. In most cases you can just try again and it’ll work. If the format keeps failing, try a different SD card.
Many disk duplication tools do a simultaneous format and write of the target disk. Some will also do a bit-level copy, attempting to duplicate hidden details of copy-protected source disks. Cracking tools like Copy II+ may not work correctly when the target disk is a Floppy Emu disk image. Use DOS 3.3’s COPYA or ProDOS’s Duplicate Disk utility, both of which work fine.
Formatting is also dependent on the type of disk image used, and potentially also on the disk image’s metadata. In short: if you need to format a disk, use this Blank.woz disk image and you’ll be fine. Only NIB and WOZ disk image types support true formatting. All other types will retain standard DOS/ProDOS sector layouts and volume number 254 regardless of how you attempt to format them. NIB disk images have tracks that are about 4% bigger than normal, which is sort of like a disk drive that spins 4% too slowly. DOS 3.3 still formats a NIB just fine, as will games using normal RWTS routines, but ProDOS will complain the drive is too slow. Formatting WOZ disk images is more reliable, but it must be a WOZ image of a normal disk with normal track lengths and track layouts. If you just grab some copy-protected WOZ disk image and try to format it, it may fail. The provided Blank.woz should format nicely using most Apple II programs.
Dual 5.25 inch drive emulation is here!
Now the Emu hardware can emulate two 5.25 inch drives at once, which is great for two-disk games and for reducing disk swapping. This feature is available on the Floppy Emu Model C, so you may wish to consider an upgrade if you have an older model and frequently use 5.25 inch floppy emulation. Dual 5.25 emulation mode is compatible with any Apple II computer or 5.25 inch disk controller with a 19-pin D-SUB (DB-19) connector, except the Apple IIc. The IIc and the rectangular 10×2 pin disk connector both lack the necessary disk I/O signal for controlling a second drive. Both could theoretically be supported in the future with some kind of Y-cable adapter that plugs in to two separate disk connectors. Coming soon, maybe?

Don’t use Dual 5.25 mode in combination with the optional BMOW Daisy Chainer or A/B Switch. It will cause disk errors and could damage the Floppy Emu or your daisy-chained 5.25 inch drive.
Dual 5.25 mode emulates two daisy-chained 5.25 inch drives on a single Floppy Emu board. When using this mode, care must be taken to avoid accidentally creating a forked daisy chain with two branches. This could cause the Floppy Emu and another daisy-chained or A/B-connected 5.25 inch drive to fight with each other, possibly damaging them both. To avoid this, select single 5.25 inch emulation mode when using the Daisy Chainer or A/B switch.
Read 39 comments and join the conversationBMOW Product Updates
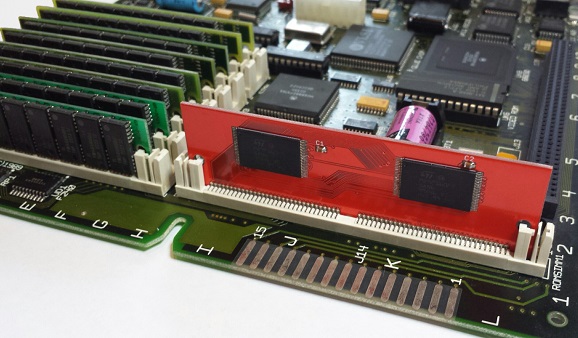

The Mac ROM-inator II is back in stock – get yours now at the BMOW Store. The ROM-inator II is a replacement ROM SIMM for Macintosh II series computers and the Mac SE/30, adding a bootable ROM disk, 32-bit cleanliness, HD20 hard disk support, and more. Read more about it at the project’s home page.
The instruction manual for the BMOW Floppy Emu disk emulator is now available in Japanese. Thanks to Kay Koba for the translation work. Floppy Emu is a floppy and hard disk emulator for classic Apple II, Macintosh, and Lisa computers. It uses an SD memory card and custom hardware to mimic an Apple floppy disk and drive, or an Apple hard drive. The Emu behaves exactly like a real disk drive, requiring no special software or drivers.
Read 1 comment and join the conversation